![]() We'll start with an in-depth example — designing the control system for a simple car simulation. Our goal is to write a set of rules that allows the car to navigate roads, such as the one to the right.
We'll start with an in-depth example — designing the control system for a simple car simulation. Our goal is to write a set of rules that allows the car to navigate roads, such as the one to the right.
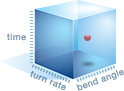
What inputs does our system have? Let's say that our car has a very simple sensor which can only detect three states: the car is on the road, left of the road, or right of the road.
How do we design the rules for the car to follow? We don't understand this system well enough to predict its behavior, so we need to prototype. We start with the simplest possible design, and thoroughly explore it. As we develop a feel for how it works, we'll get ideas for improvements. We try an idea, explore again, and keep iterating. Our design and our intuition should grow side-by-side.
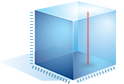
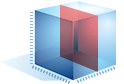
The simplest possible rule here might be to turn right when off-road to the left, and turn left when off-road to the right.
To the right is an algorithm which encodes this strategy.
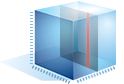
Click Tap to the right to find out how this algorithm behaves.
I suspect we all know someone whose driving is accurately modeled by this algorithm.